2025 AME-MME Capstone Projects
Department of Automotive and Mechatronics Engineering and Department of Mechanical and Manufacturing Engineering
-
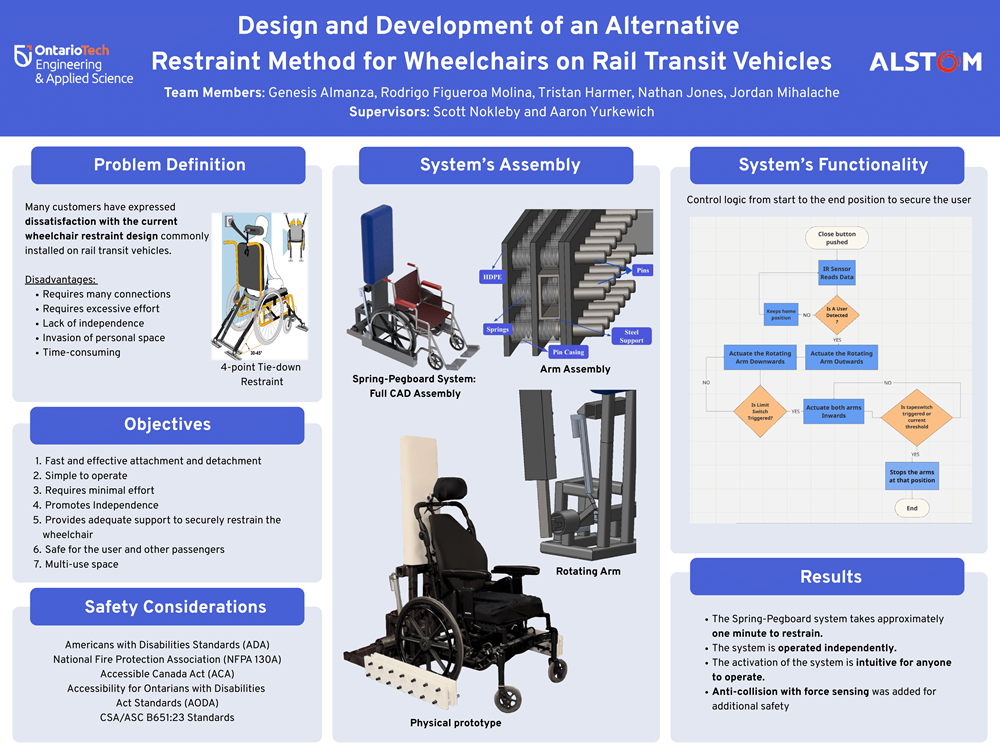
FIRST PLACE: Alternative Restraint Method for Wheelchairs on Rail Transit Vehicles
Group Members: Genesis Zarahi Almanza De Leon, Rodrigo Figueroa Molina, Tristan Harmer, Nathan Jones, Jordan Mihalache
Faculty Advisor: Dr. YukewichDescription: An innovative new system for securing wheelchair passengers on rail transit.
-
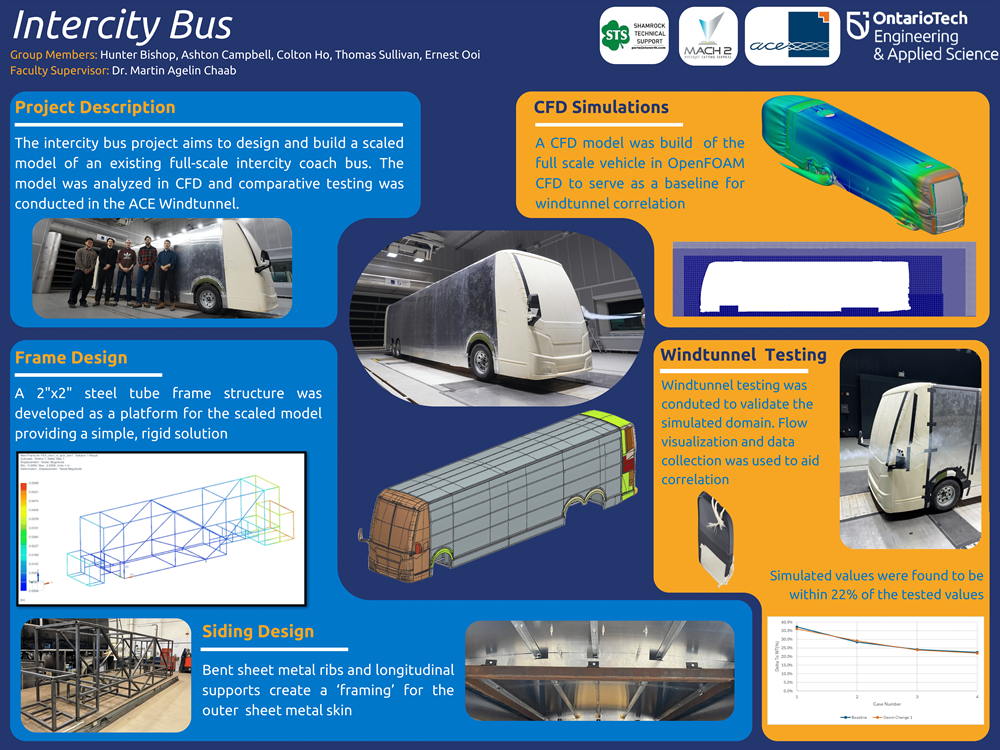
SECOND PLACE: Inter-City Bus Project
Group Members: Hunter Bishop, Ashton Campbell, Colton Ho, Ernest Ooi, Thomas Sullivan
Faculty Advisor: Dr. Agelin-ChaabDescription: Building of a 55.6% scaled intercity bus model for wind tunnel validation of CFD simulations.
-
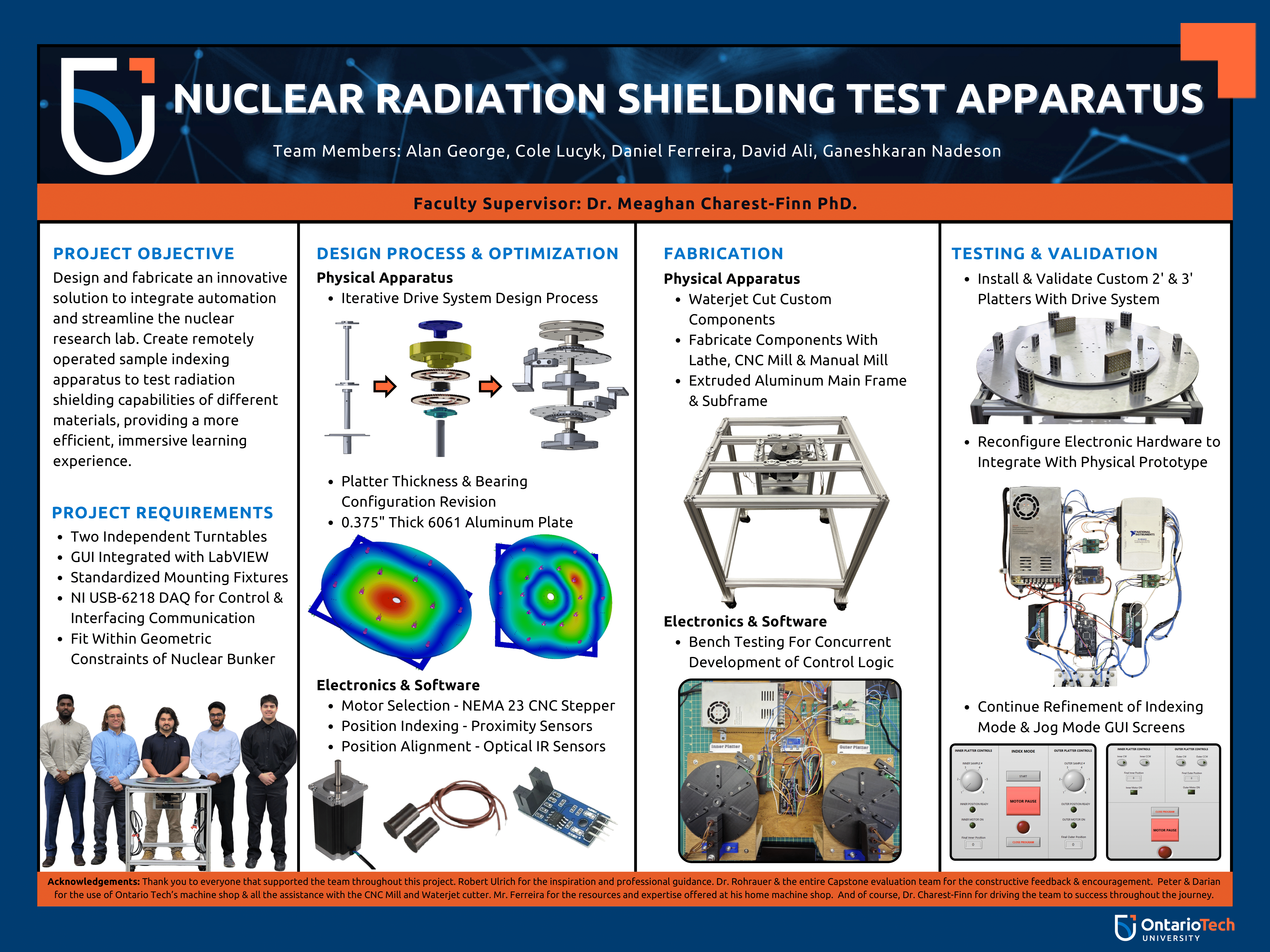
THIRD PLACE: Nuclear Radiation Shielding Test Apparatus
Group Members: David Ali, Daniel Ferreira, Alan George, Cole Lucyk, Ganeshkaran Nadeson
Faculty Advisor: Dr. Charest-FinnDescription: Design & fabricate an innovative solution to modernize the outdated manual experiment setup process by implementing an automated, remotely operated sample indexing apparatus to enhance the efficiency of the Ontario Tech nuclear research laboratory experience.
-
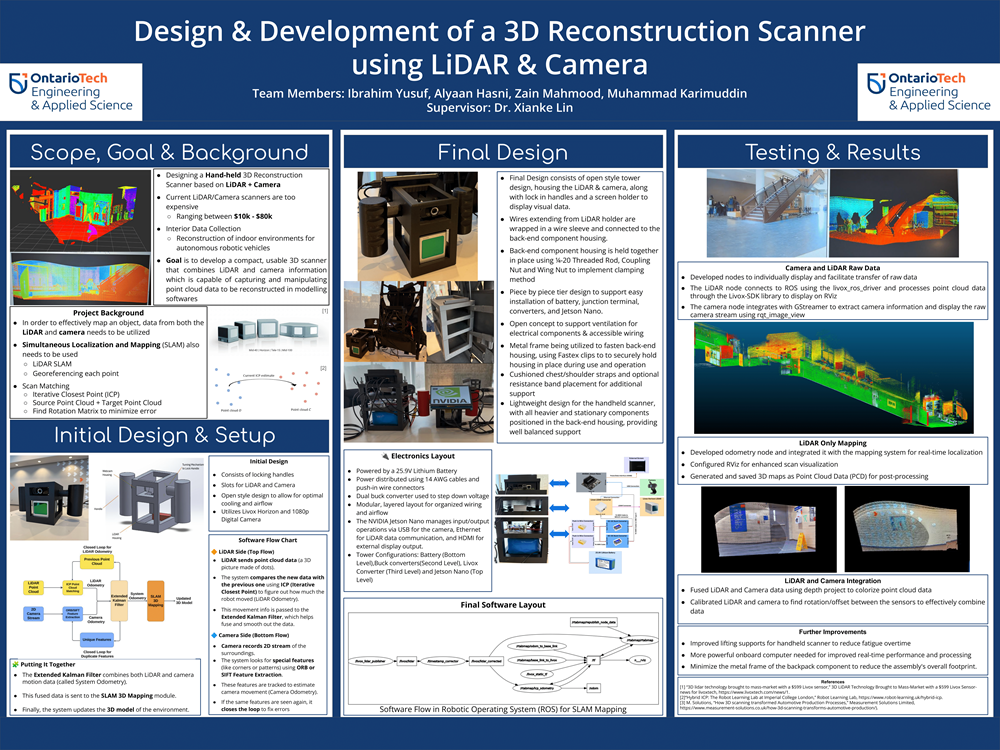
3-D Handheld Reconstruction Scanner
Group Members: Alyaan Hasni, Muhammad Karimuddin, Zain Mahmood, Ibrahim Yusuf
Faculty Advisor: Dr. LinDescription: A compact, user-friendly 3D scanner that integrates LiDAR and camera data to capture and process point clouds for reconstruction in modeling software.
-
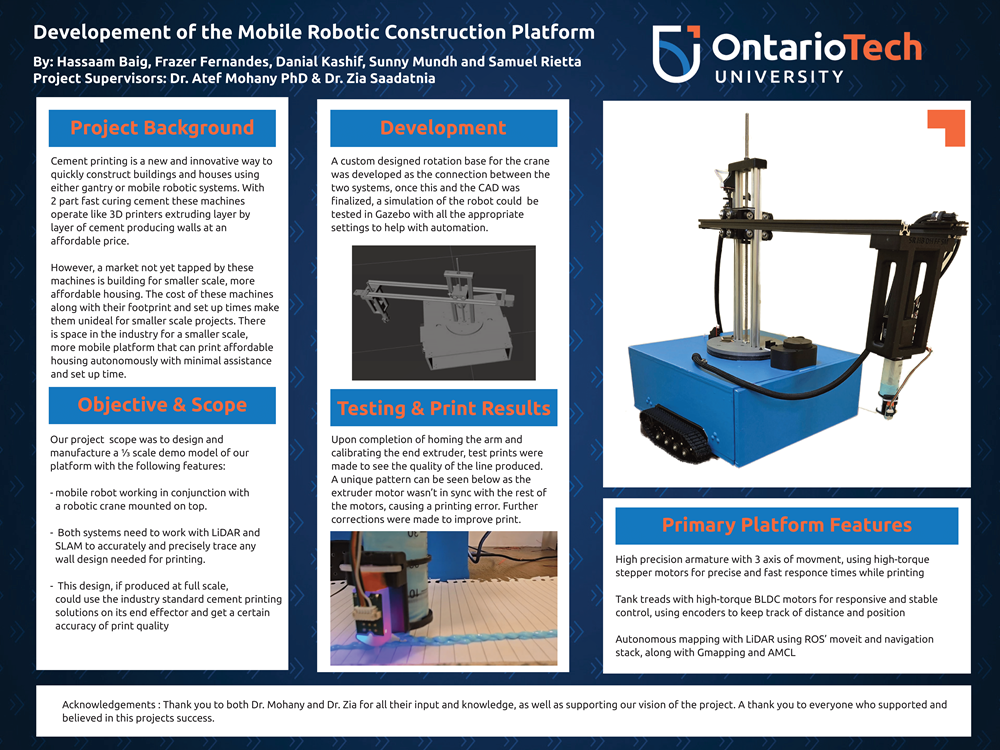
3-D Robotic Construction Platform
Group Members: Hassaam Baig, Frazer Fernandes, Danial Kashif, Sunny Mundh, Samuel Rietta
Faculty Advisor: Dr. Saadatnia, Dr. MohanyDescription: An autonomous mobile platform with a robotic crane mounted on top to use in conjunction with industry standard concrete printing methods to build affordable homes. Using LiDAR and SLAM the robot can maneuver throughout a job site with ease. Then using the crane’s envelope of motion, it can extrude any wall design.
-
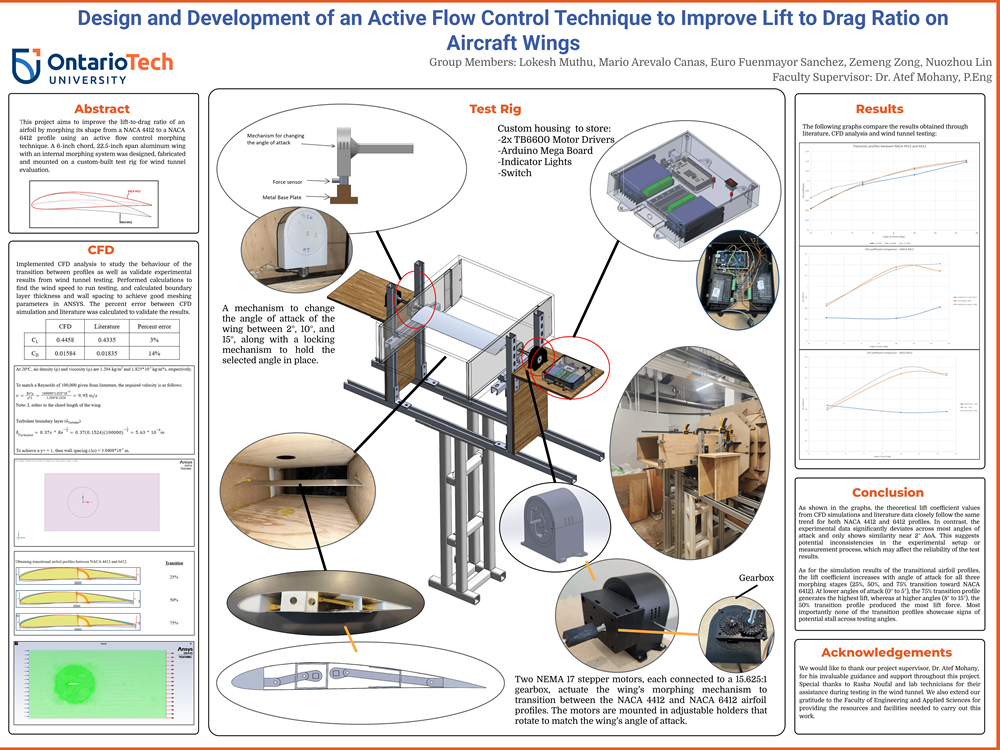
Active Flow Control Technique to Improve Lift to Drag Ratio on Aircraft Wings
Group Members: Mario Arevalo Canas, Euro Fuenmayor Sanchez, Nuozhou Lin, Lokesh M Muthu, David Zong
Faculty Advisor: Dr. Mohany, Dr. AydinDescription: Design and development of an active flow control technique to improve the lift-to-drag ratio on aircraft wings through shape morphing.
-
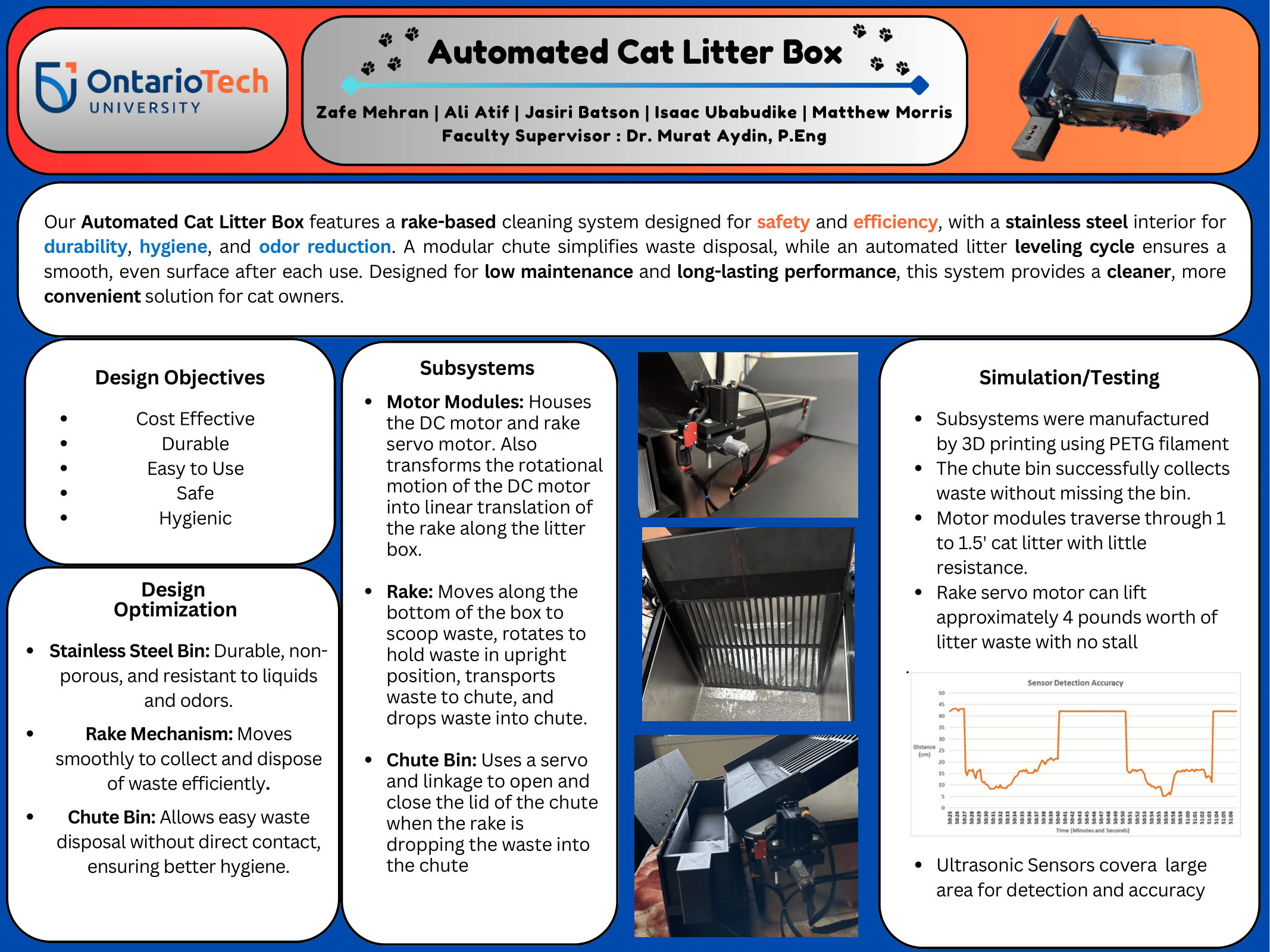
Design and Concept: Automated Cat Litterbox
Group Members: Ali Atif, Jasiri Batson, Zafe Mehran, Matthew Morris, Issac Ubabudike
Faculty Advisor: Dr. AydinDescription: The automated cat litter box is a cost-effective, open-concept system that uses a motorized rake activated by ultrasonic sensors to safely clean solid waste and deposit it into a collection bin, ensuring hygiene, ease of use, and odor control.
-
Water Wave Tank
Group Members: Elias Awada, Samer Bassili, Thomas Giannnone, Sharoon Tariq
Faculty Advisor: Dr. Aydin, Dr. Mohany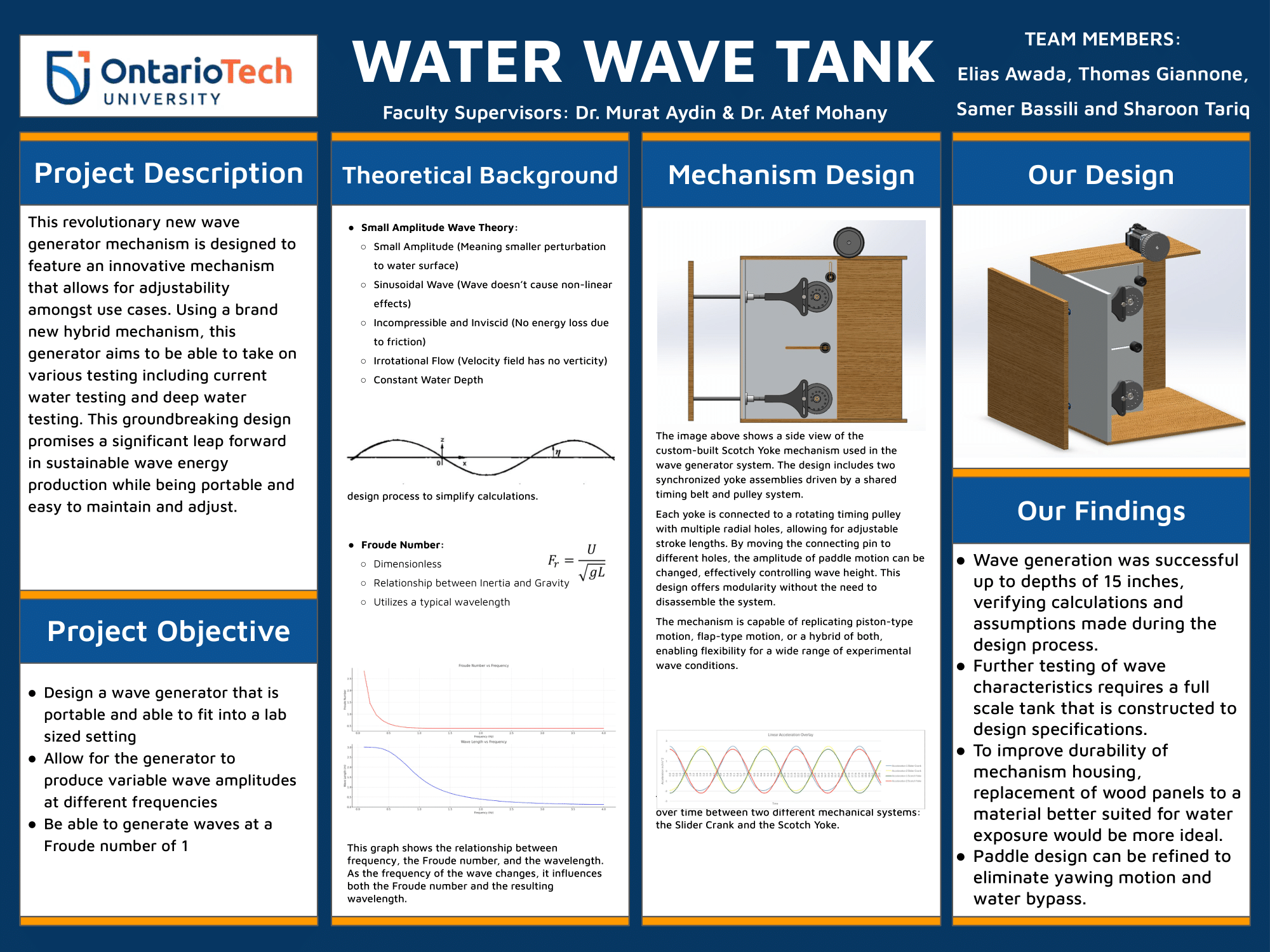
-
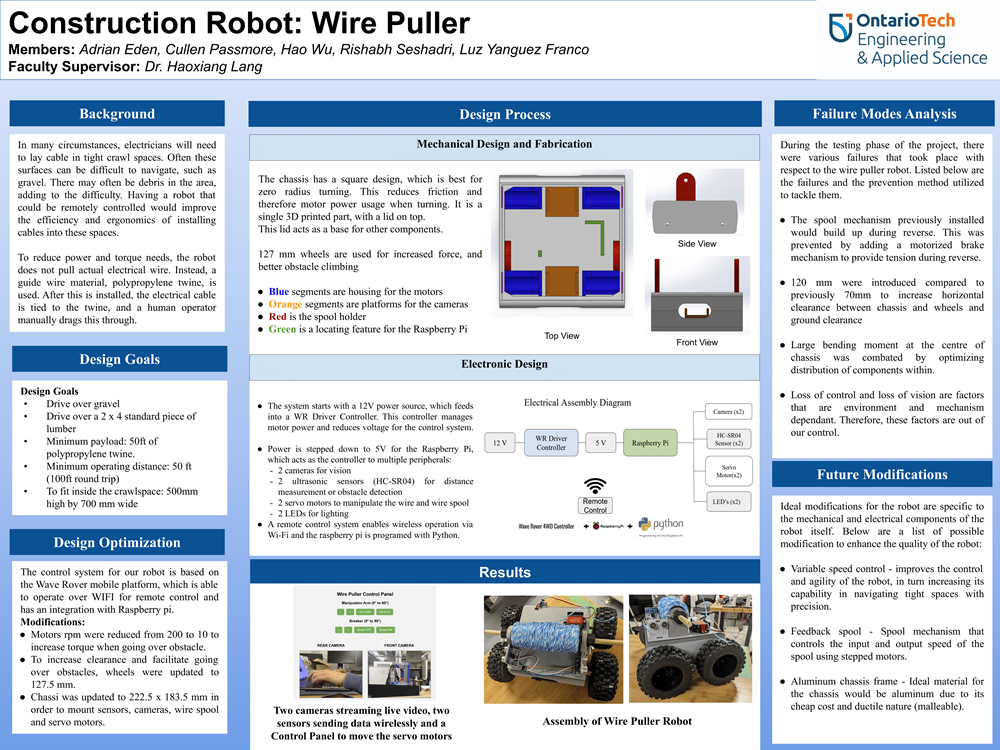
Wire Puller Robot
Group Members: Adrian Eden, Cullen Passmore, Rishabh Seshadri, Brian Wu, Luz Yanguez Franco
Faculty Advisor: Dr. LangDescription: A remote controlled robot that lays a guidewire under crawlspaces, helping electricians to drag low voltage cables during installation.
-
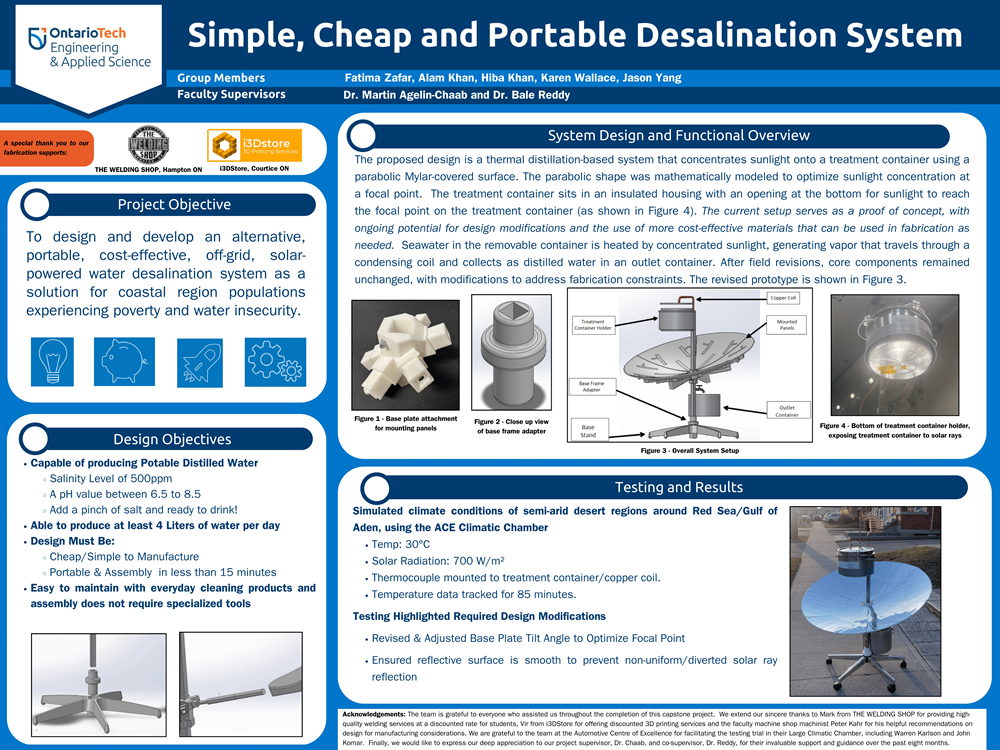
Design and Development of a Smiple, Cheap and Portable Desalination System
Group Members: Alam Khan, Hiba Khan, Karen Wallace, Jason Yang, Fatima Zafar
Faculty Advisor: Dr. Reddy, Dr. Agelin-ChaabDescription: Design and development of an alternative, portable, cost-effective, solar-powered desalination system, as a potable water solution for coastal region populations experiencing poverty and water insecurity.
-
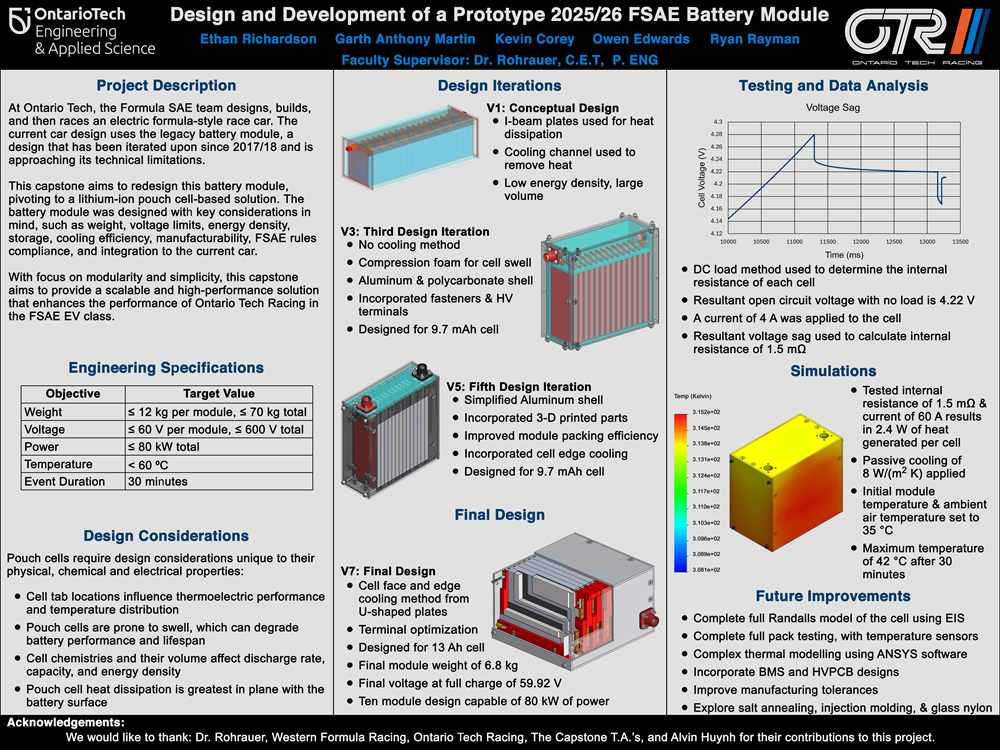
Design and Development of a Prototype 2025/26 FSAE Battery Module
Group Members: Kevin Corey, Owen Edwards, Anthony Martin, Ryan Rayman, Ethan Richardson
Faculty Advisor: Dr. RohrauerDescription: This capstone involved analyzing, designing and testing a pouch cell based battery for an electric formula-style race car, then producing a prototype module which meets key Formula SAE regulations.
-
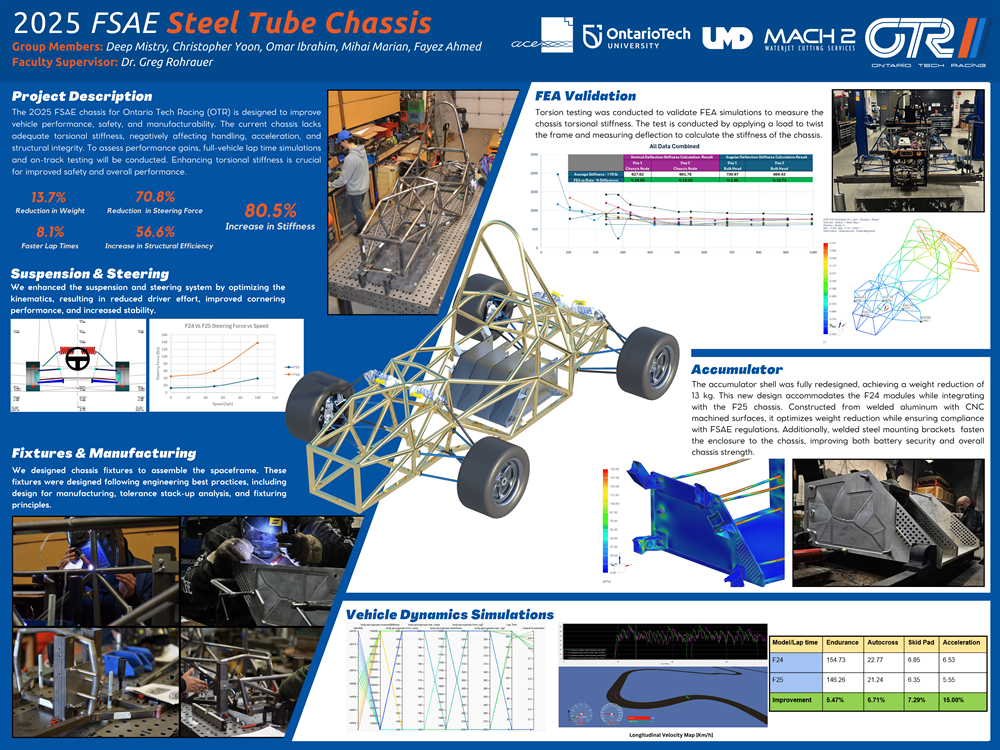
FSAE Steel Tube Chassis
Group Members: Omar Ibrahim, Mihai Marian, Deep Mistry, Christopher Yoon, Fayez Ahmed
Faculty Advisor: Dr. RohrauerDescription: Our project details the design and manufacturing of an FSAE race car chassis, along with its accompanying systems, including suspension and steering geometry, battery housing, and chassis welding fixtures, with the focus of optimizing stiffness, weight and vehicle performance.
-
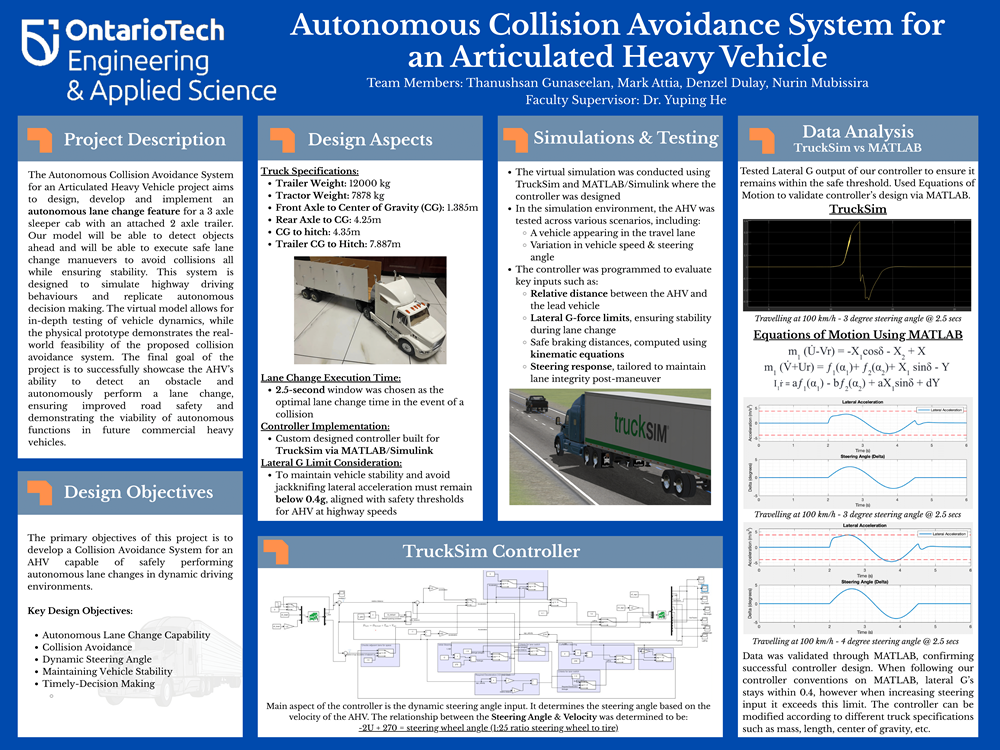
Heavy Articulated Vehicle Stability
Group Members: Thanushsan Gunaseelan, Mark Attia, Denzel Dulay, Nurin Mubassira
Faculty Advisor: Dr. HeDescription: An autonomous collision avoidance system for heavy vehicles that performs safe lane changes to avoid an accident while maintaining vehicle stability through lateral G-force limits and dynamic control algorithms.
-
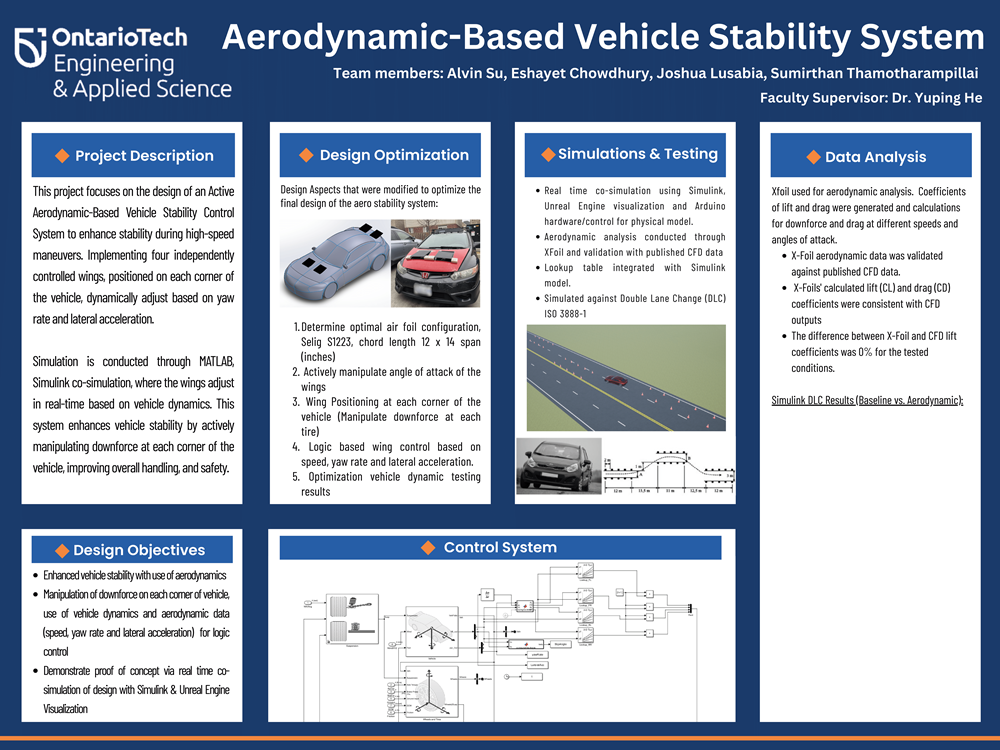
Aero Based Vehicle Stability Control
Group Members: Eshayet Ahmed Chowdhury, Joshua Albert Lusabia, Alvin Su, Sumirthan Thamotharampillai
Faculty Advisor: Dr. HeDescription: This project implements a novel vehicle stability control system designed around aerodynamics, utilizing four independently actuated wings at each corner of the vehicle that dynamically adjust based on yaw rate and lateral acceleration to enhance high speed maneuverability.
-
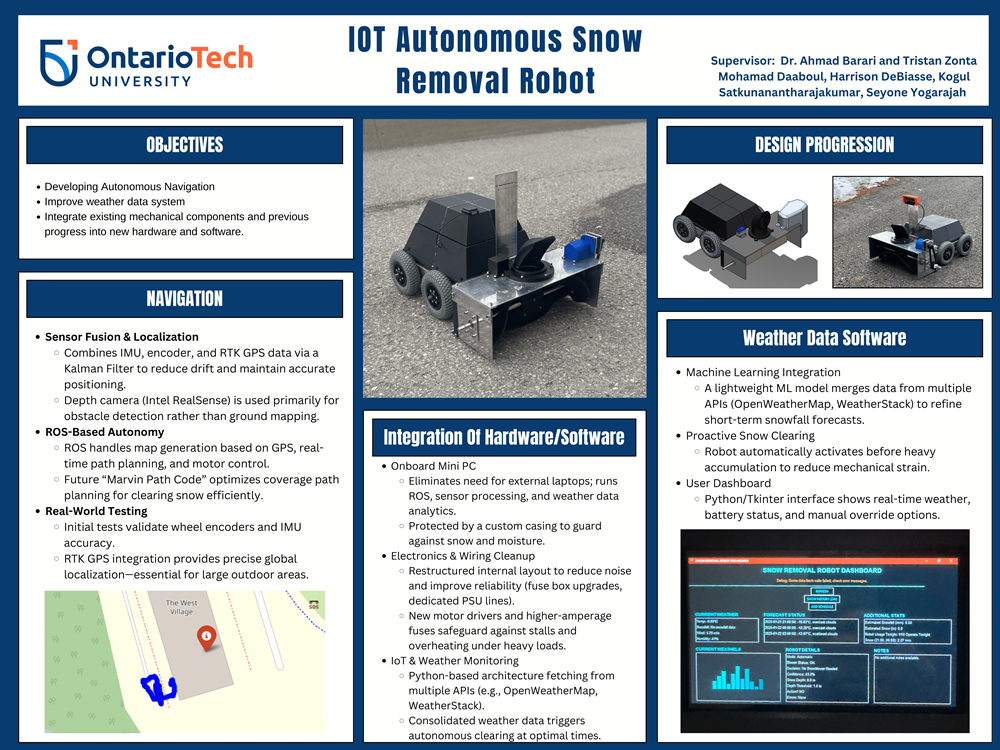
IoT Autonomous Snow Removal Robot
Group Members: Mohamad Daaboul, Harry DeBiasse, Kogul Satkunanantharajakumar, Seyone Yogarajah
Faculty Advisor: Dr. BarariDescription: 5th Year IoT Autonomous Snow Blowing Robot, with a project goal to advance further towards full autonomous navigation while expanding Internet of Things.
-
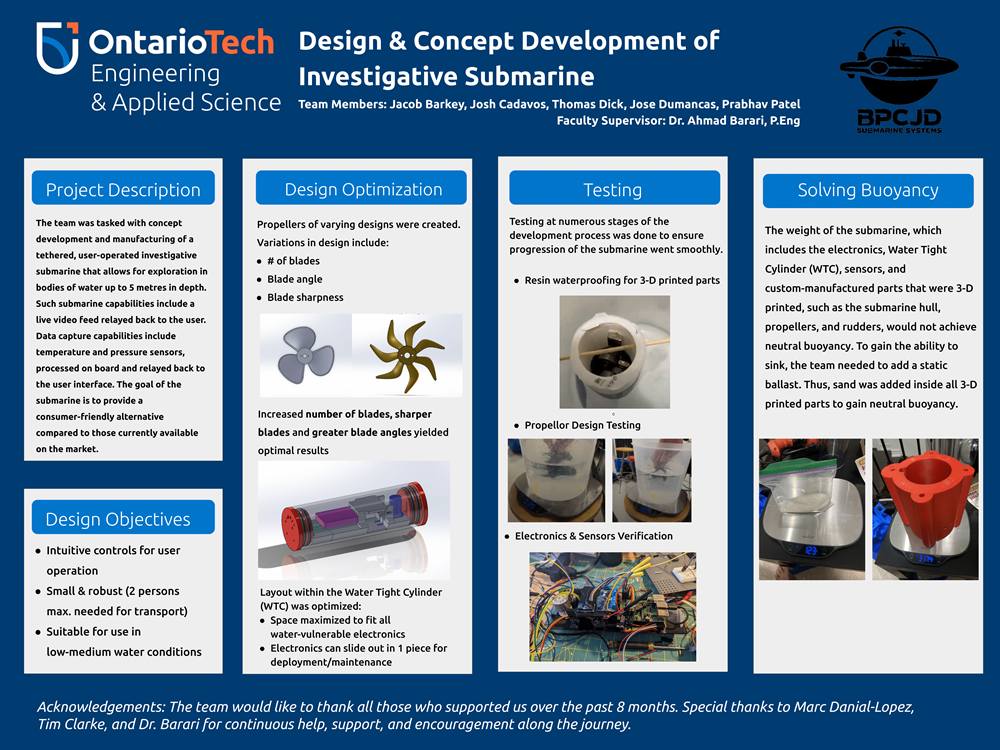
Design and Concept Development of an Investigative Submarine
Group Members: Jacob Barkey, Josh Cadavos, Thomas Dick, Jose Dumancas, Prabhav Patel
Faculty Advisor: Dr. BarariDescription: This project involves the design and prototyping of a remote-controlled submarine with data and depth control capabilities, intended for general-purpose underwater exploration and data acquisition, capable of reaching depths of up to 5 meters, having applications including underwater planning and environmental surveying.
-
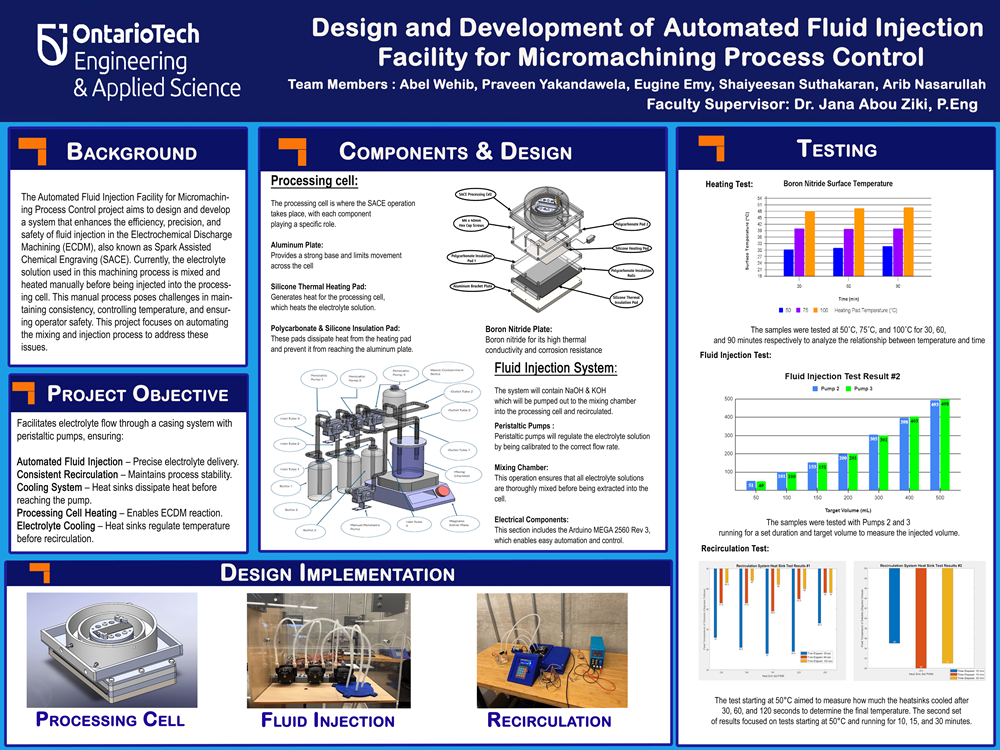
Design and Developmnet of automated Fluid Injection Facility for Micromachining Process Control
Group Members: Eugine Emy, Arib Nasarullah, Shaiyeesan Suthakaran, Abel Wehib, Praveen Yakandawela
Faculty Advisor: Dr. Abou-ZikiDescription: The design and fabrication of an automated fluid mixing and injection system, as well as a recirculation system that incorporates a redesigned SACE machining cell to allow temperature control.
-
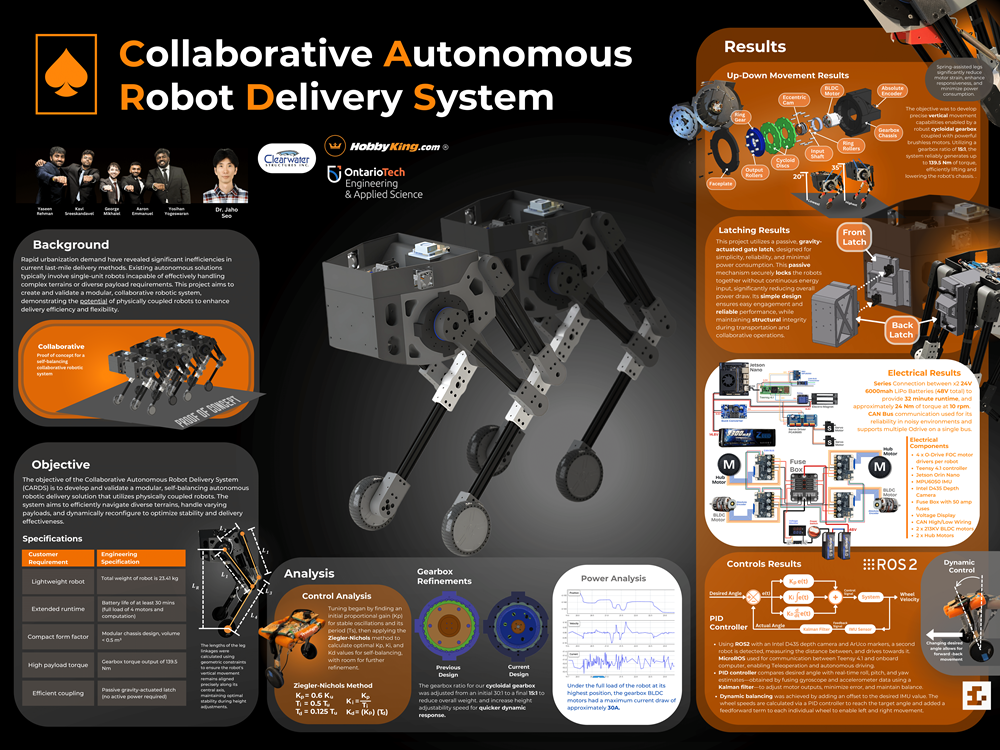
Collaborative Autonomous Robot Delivery System
Group Members: Aaron Emmanuel, George Mikhaiel, Yaseen Rehman, Kavi Sreeskandavel, Yosihan Yogeswaran
Faculty Advisor: Dr. SeoDescription: Design and development of two self-balancing robots capable of dynamically moving forward/back/left/right, with one robot featuring vertical leg mobility and both robots able to latch together for collaborative functionality.
-
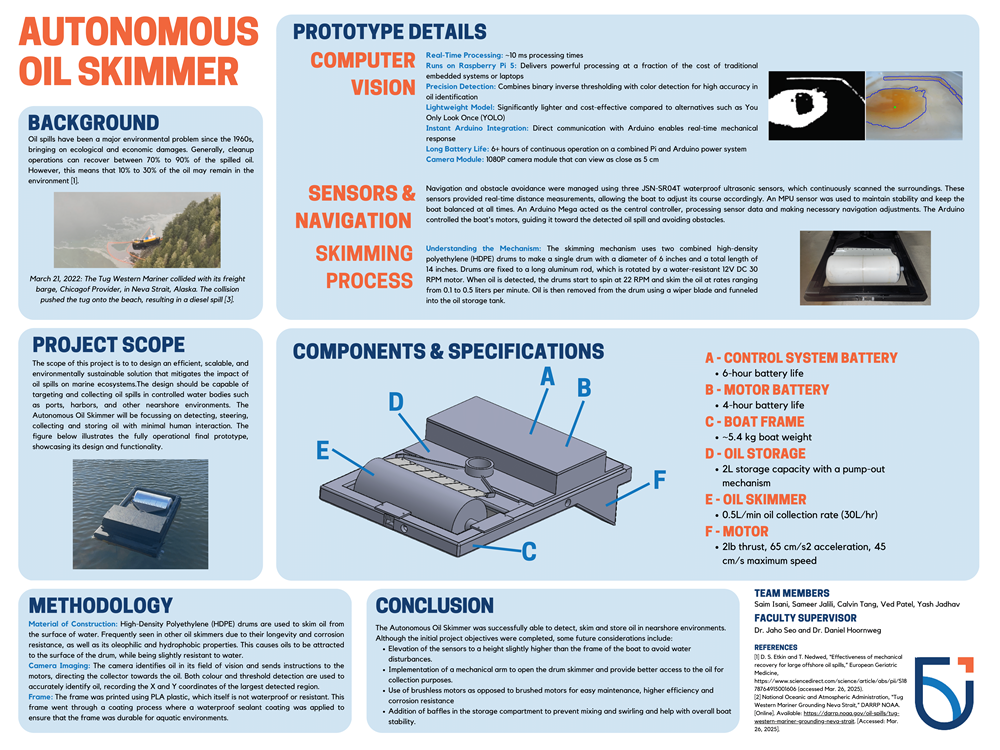
Conceptual Design and Development: Autonomous Oil Skimmer
Group Members: Saim Isani, Yash Jadhav, Sameer Jalili, Ved Patel, Calvin Tang
Faculty Advisor: Dr. Hoornweg, Dr. SeoDescription: Developed an autonomous oil skimmer platform capable of detecting, navigating towards, and collecting oil in nearshore environments using a polyethylene drum skimmer and real-time computer vision.
-
Designing and Building a Shredder for Recycling Plastics
Group Members: Charles Arulappah, Jason Dacosta, Aidan Ferkl, Ahmed Mohamed, Spencer Robertson
Faculty Advisor: Dr. FayazfarDescription: Our innovative plastic shredder design offers a compact, durable, and eco-friendly solution to transform ocean plastic waste into high quality recyclable materials, driving sustainability, promoting a circular economy, and revolutionizing additive manufacturing.

-
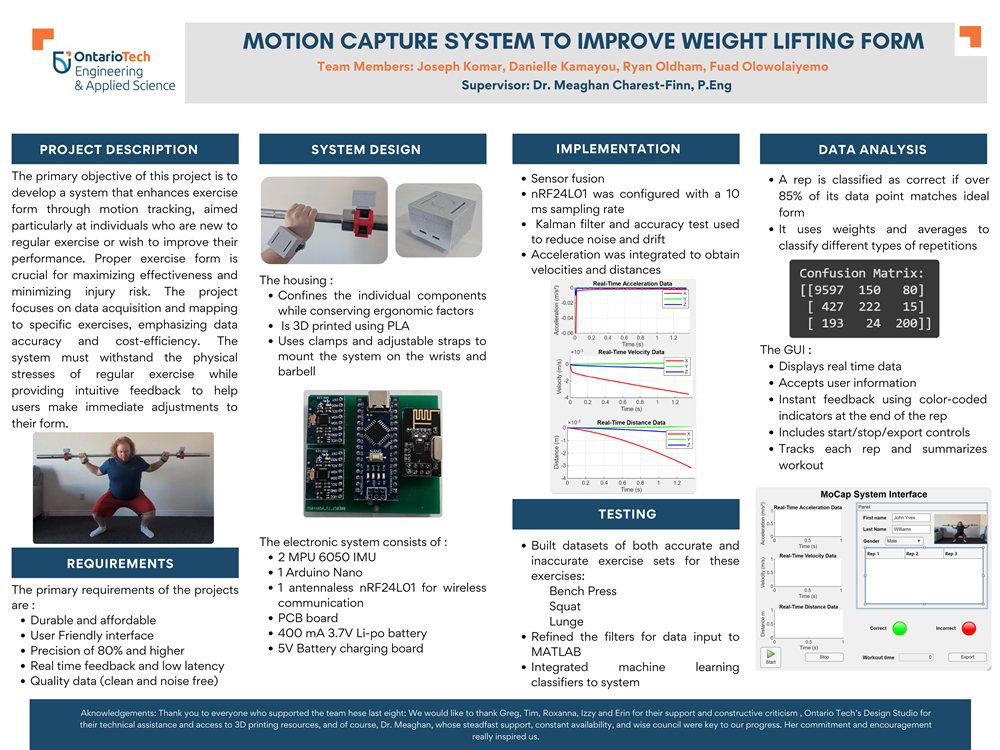
Motion Capture System to Improve Weight Lifting Form
Group Members: Danie Kamayou, Joseph Komar, Ryan Oldham, Faud Olowolaiyemo
Faculty Advisor: Dr. Charest-FinnDescription: Our system is a minimum viable product wearable motion capture system utilizing 4 modules containing IMUs and machine learning to characterize correct and incorrect motions to improve technique, acting as a platform for further expansion into dedicated hardware and software.
-
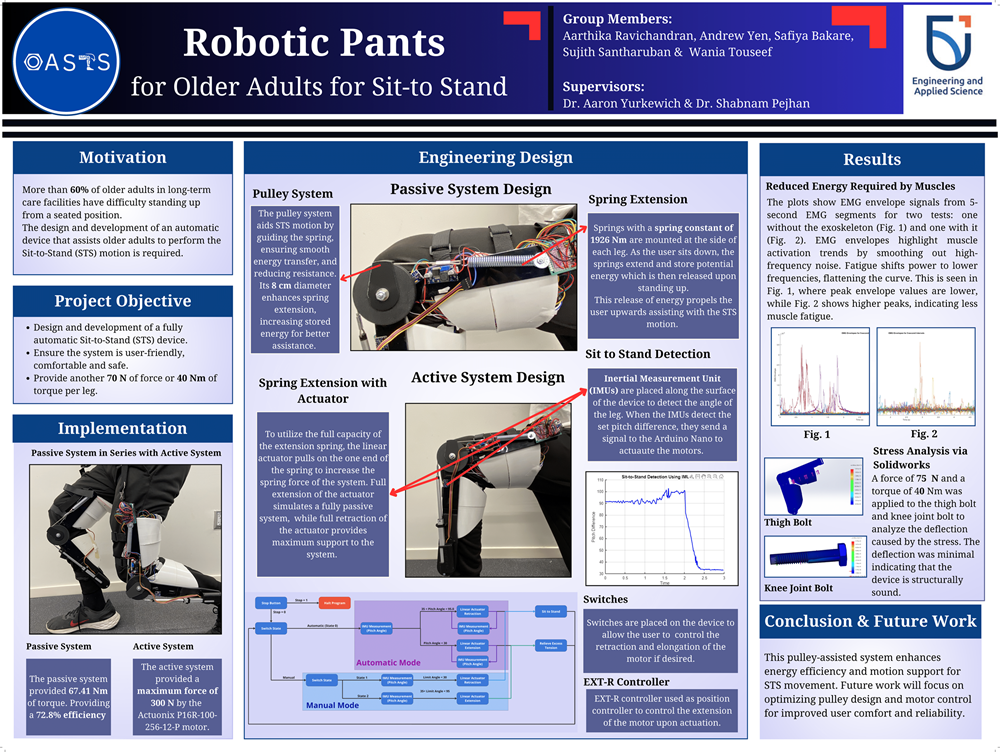
Robotic Pants for Older Adults to Perform Sit to Stand
Group Members: Sujith Santharuban, Safiya Bakare, Aarthika Ravichandran, Wania Touseef, Andrew Yen
Faculty Advisor: Dr. Yukewich, Dr. PejhanDescription: A lower limb exoskeleton that provides older adults with assistance in sit-to stand motion using a combination of active and passive systems.
-
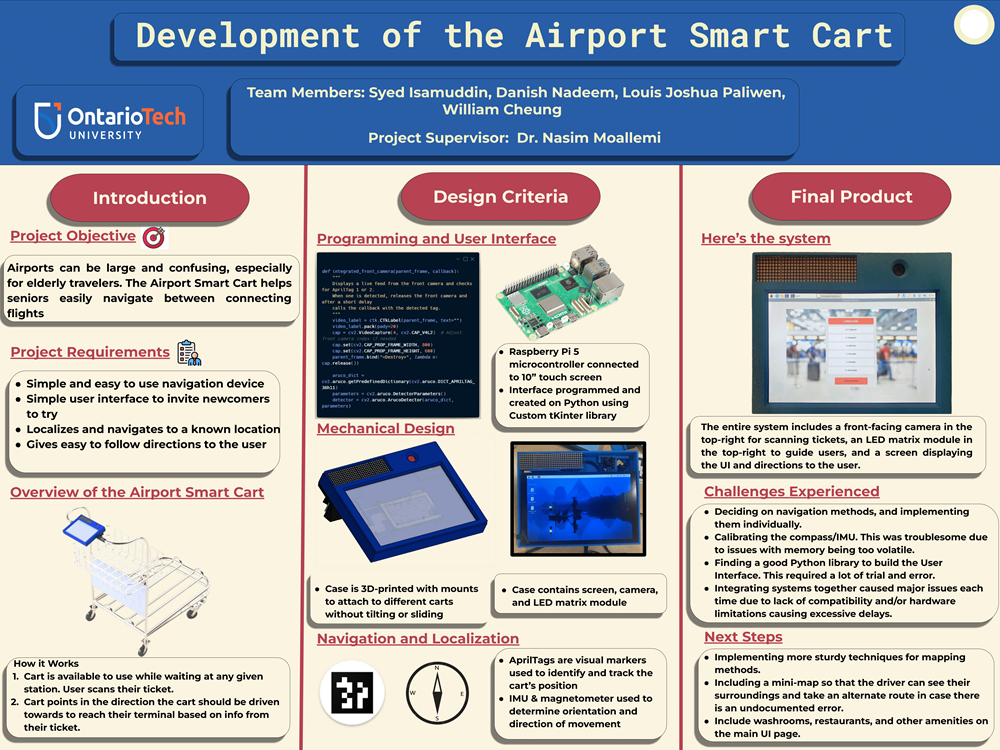
Airport Smart Cart
Group Members: William Cheung, Syed Isamuddin, Danish Nadeem, Louis Joshua Paliwen
Faculty Advisor: Dr. MoallemiDescription: Attached to the handlebar of a luggage cart is a device designed to assist senior passengers in navigating to their connecting flights by integrating a touchscreen display, AprilTag markers, a compass, and a minimalistic user interface, ensuring a stress-free experience.
-
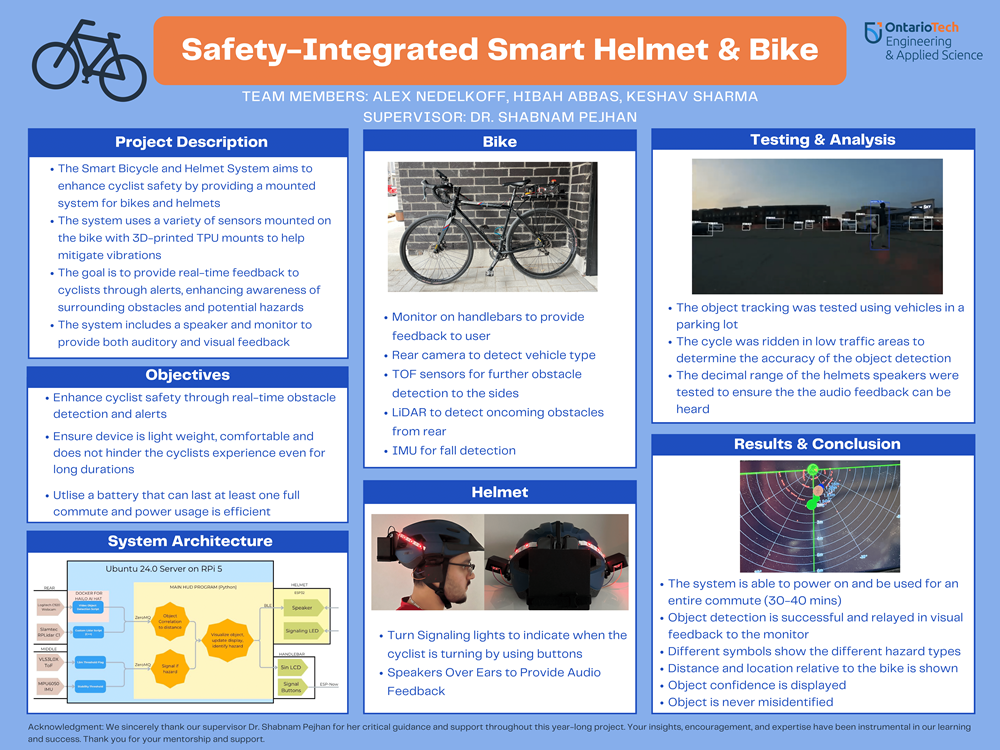
Safety-Integrated Smart Helmet and Bike
Group Members: Hibah Abbas, Adam Garand, Alex Nedelkoff, Keshav Sharma
Faculty Advisor: Dr. PeijhanDescription: The smart cycling safety helmet is a safety system which features a bike and helmet equipped with various sensors including LiDAR and ToF to enhance rider awareness through object detection and alerts.
-
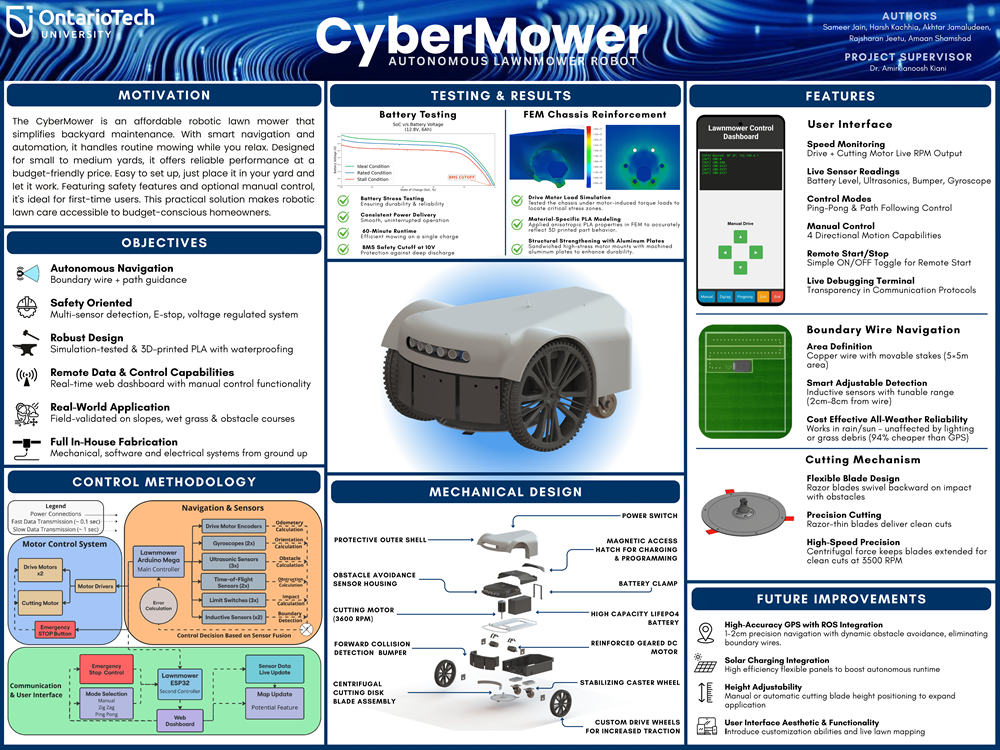
CyberMower - Autonomous Lawn Mower
Group Members: Rajsharan Jeetu, Amaan Ahmed, Sameer Jain, Akhtar Jamaludeen, Harsh Kachhia
Faculty Advisor: Dr. KianiDescription: Low-cost robotic lawnmower prioritizing mechanical reliability, sensor-based path planning, and intuitive software control for autonomous grass cutting and convenient residential backyard maintenance.
-
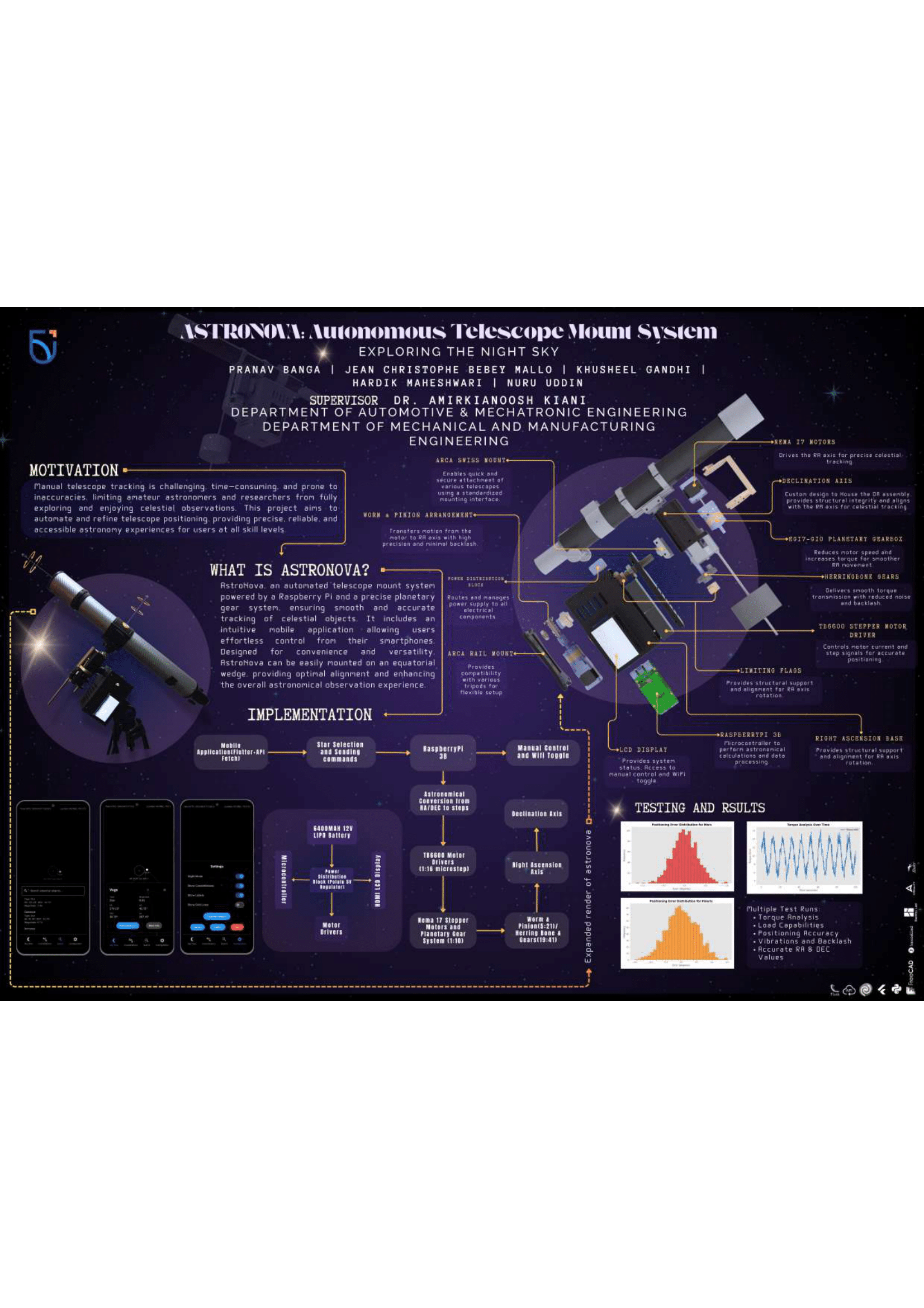
Mobile App 3D Telescope Mount
Group Members: Pranav Banga, Jean Christophe Bebey Mallo, Khusheel Bankim Gandhi, Hardik Maheshwari, Nuru Nur Mohammed
Faculty Advisor: Dr. KianiDescription: Astronova, an autonomous telescope mount system integrated with a robust software application that delivers precise tracking, automated alignment, and an intuitive mobile application to control and enhance astronomical observations.
-
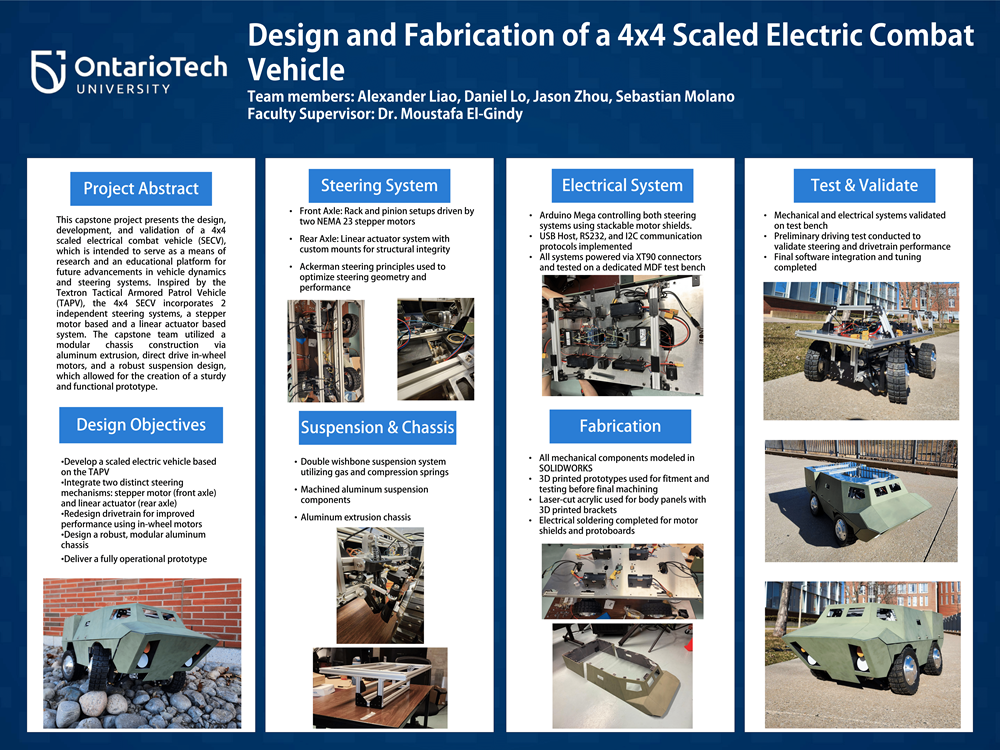
Design and Fabrication of a 4x4 Scaled Electric Combat Vehicle
Group Members: Alexander Liao, Daniel Lo, Sebastian Molano, Jason Zhou
Faculty Advisor: Dr. El-GindyDescription: The objective of our project was to create a functioning 4x4 Scaled Electronic Combat Vehicle which incorporates Ackermann Steering, In-wheel Motors, and represents the Textron TAPV, acting as the baseline for future autonomous vehicle research.
-
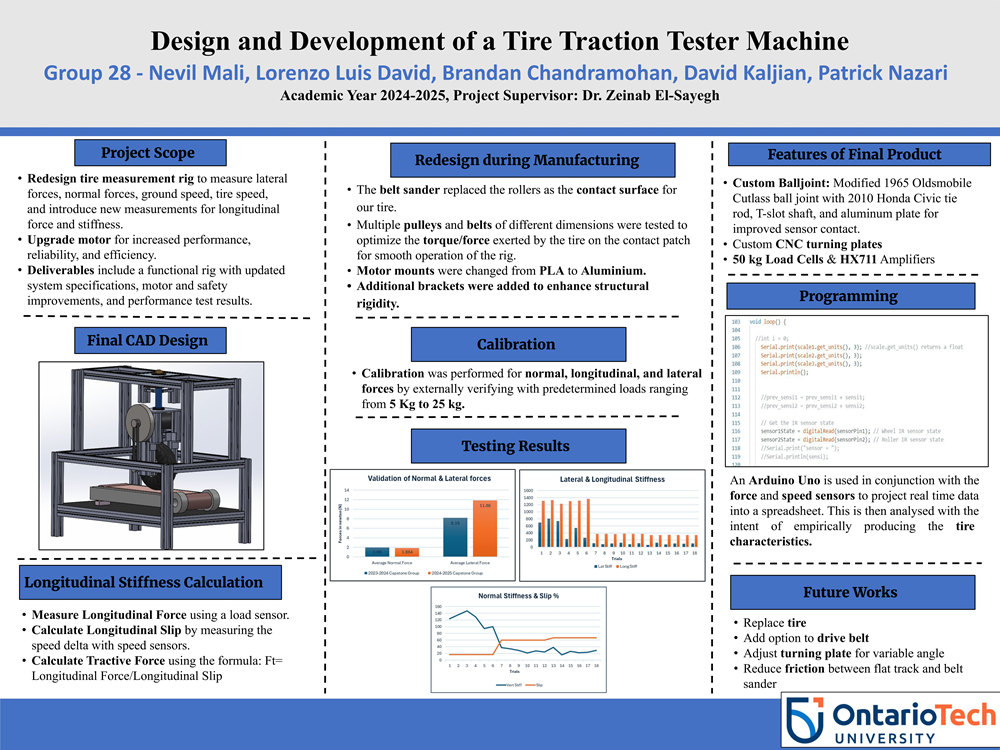
Design and Development of a Tire Traction Tester Machine
Group Members: Brandan Chandramohan, Lorenzo David, David Kaljian, Nevil Mali, Patrick Nazari
Faculty Advisor: Dr. El-SayeghDescription: Tire characteristic testing rig capable of measuring longitudinal force, lateral force, normal force, and tire/ground speed, and using these values to calculate the respective stiffness.
-
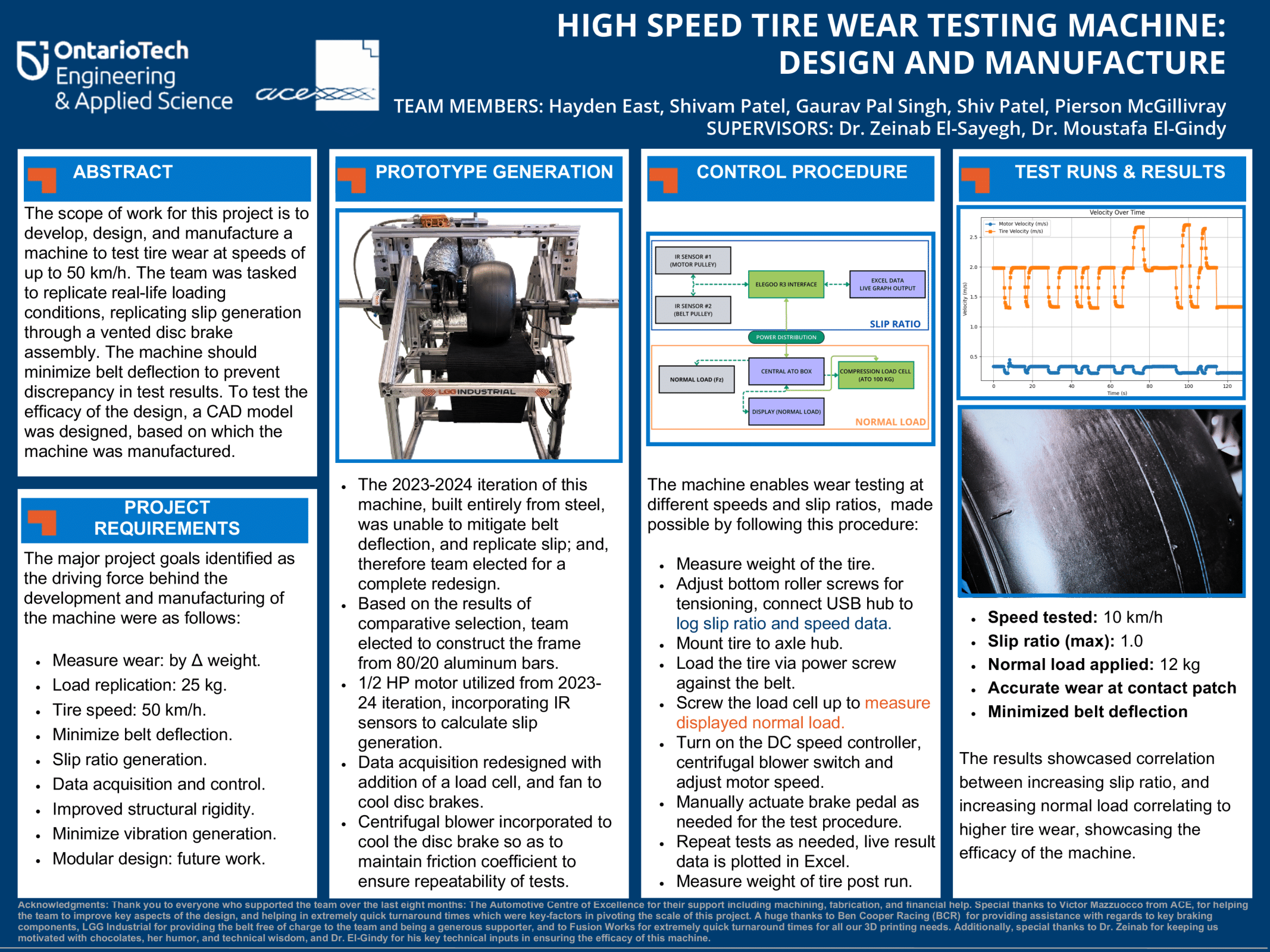
High-Speed Tire Wear Testing Machine
Group Members: Hayden East, Pierson Mcgillivray, Shivam Patel, Shiv Patel, Gaurav Pal Singh
Faculty Advisor: Dr. El-Sayegh, Dr. El-GindyDescription: To determine the effect of slip ratio and normal load on the wear pattern of a go-kart tire, based on the difference in wheel weights after successive constant speed tests.
-
Design and Prototype of an Automated Vertical Farming System
Group Members: Haseeb Ahmed, David Adegoke, Abdullah Choudary, Sophia Jalmasco, Toluwani Osindero
Faculty Advisor: Dr. Saadatina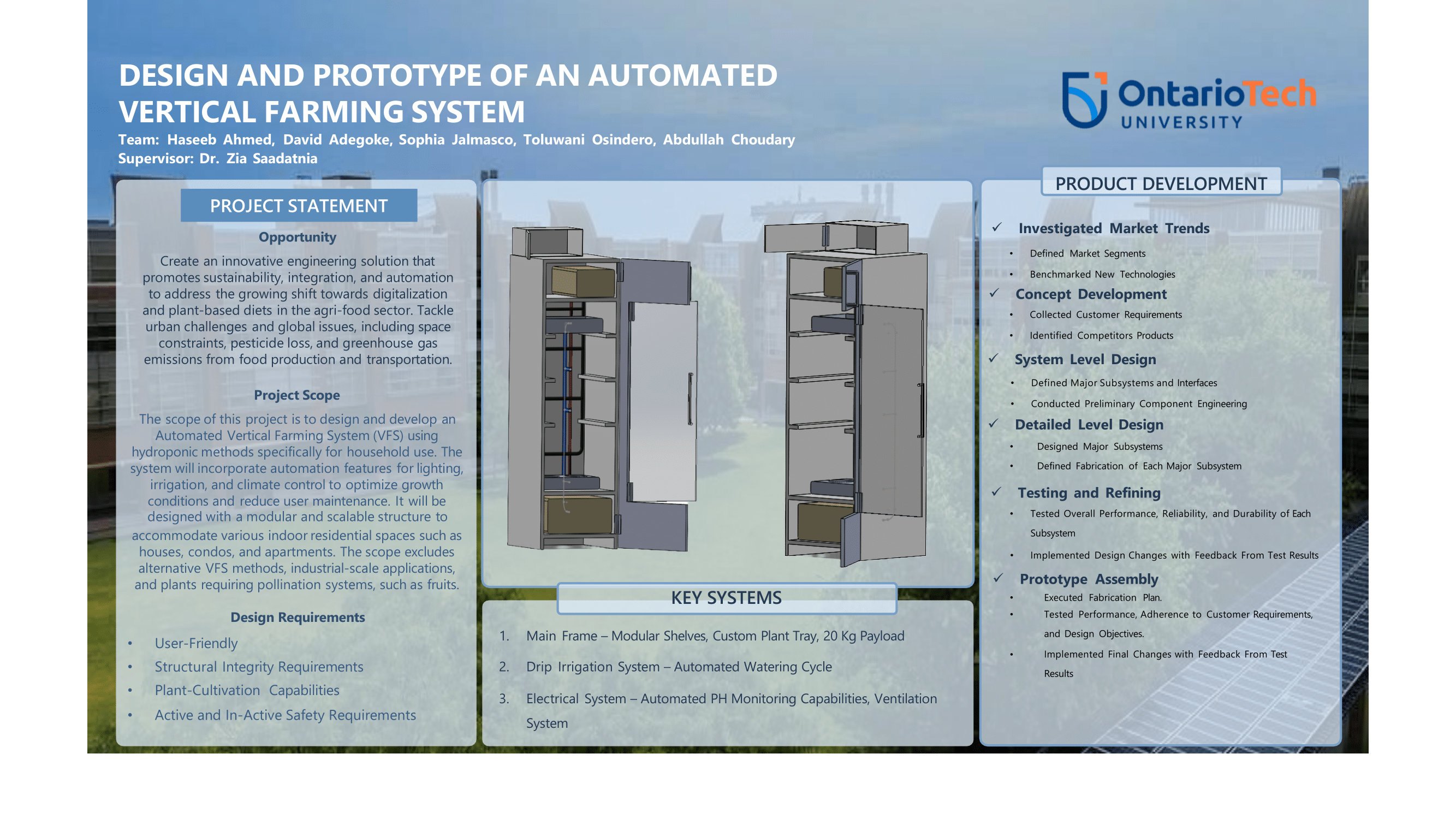
-
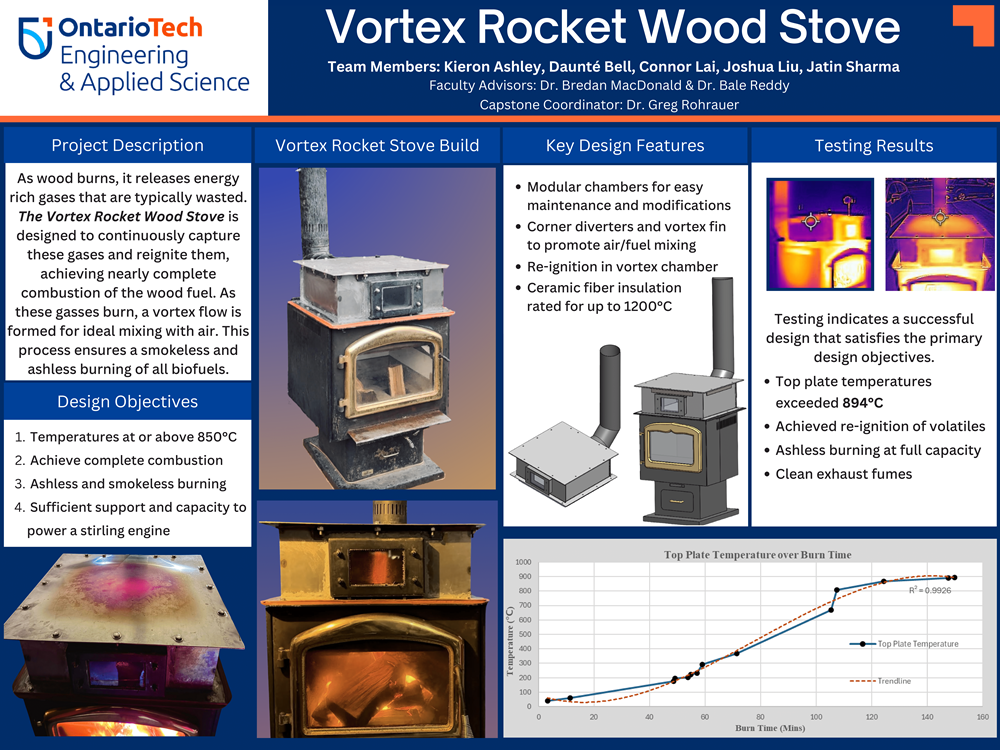
Design and Construction of a Vortex Rocket Wood Stove
Group Members: Kieron Ashley, Daunté Bell, Connor Lai, Joshua Liu, Jatin Sharma
Faculty Advisor: Dr. MacDonald, Dr. ReddyDescription: To design and manufacture a high efficiency vortex rocket wood burning stove that incorporates the use of volatile reignition, with the goal of reaching temperatures excess of 850°C and being virtually smokeless and ashless at steady state.
-
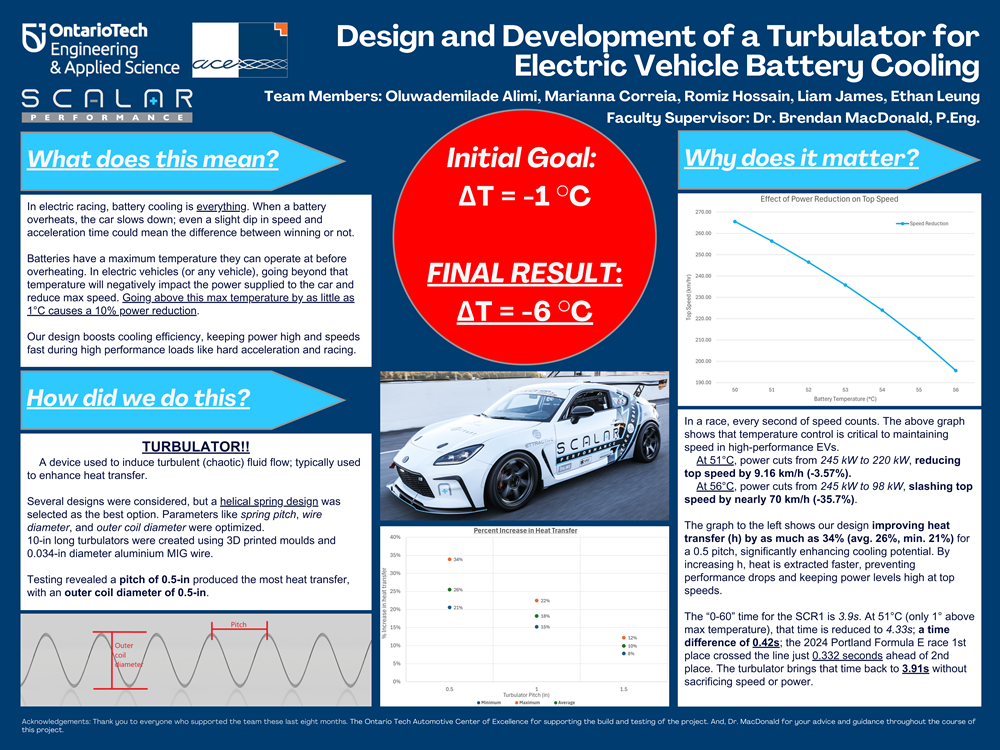
Design and Development of a Turbulator for Electric Vehicle Battery Cooling
Group Members: Oluwademilade Alimi, Marianna Correia, Romiz Hossain, Liam James, Ethan Leung
Faculty Advisor: Dr. MacDonaldDescription: Improving EV racecar battery cooling through turbulence.